Retour de force
Page 4 sur 10 •  1, 2, 3, 4, 5, 6, 7, 8, 9, 10
1, 2, 3, 4, 5, 6, 7, 8, 9, 10
Re: Retour de force
Fred Van.H. Ven 25 Oct - 19:00
Ca aurait pu être ça sur un bord d'attaque ...

Ca a été ça . Sur le toit.


Moins exposé aux chocs avec les herbes à l'atterro. Par contre, la fixation risquait de gèner la caméra dessous et les tourbillons risquaient de gèner le refroidissement du variateur, alors j'ai décalé sur le côté.

Fred Van.H.- Admin
- Messages : 3196
Date d'inscription : 30/07/2011
Age : 58
Localisation : Quelque part près de Bordeaux -

Re: Retour de force
LOMA Ven 25 Oct - 19:45
Detoute fçon c'est pas pour une mesure précise....Fred Van.H. a écrit:Implantation de la génératrice.Par contre, la fixation risquait de gèner la caméra dessous et les tourbillons risquaient de gèner le refroidissement du variateur, alors j'ai décalé sur le côté.
j'attend le rapport du prmier vol
a+

LOMA- Messages : 779
Date d'inscription : 30/07/2011
Age : 51
Localisation : Toulouse -
Re: Retour de force
Fred Van.H. Sam 26 Oct - 9:27
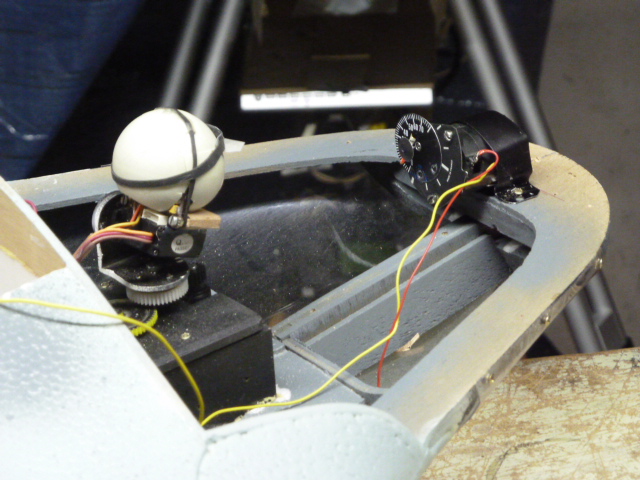
Ca fait aussi marcher le nouvel indicateur de vitesse, aussi.
Dailleurs le voici installé depuis ce matin :
Fred Van.H.- Admin
- Messages : 3196
Date d'inscription : 30/07/2011
Age : 58
Localisation : Quelque part près de Bordeaux -
Re: Retour de force
Fred Van.H. Sam 26 Oct - 13:11
Impec!
par contre, dans ma précipitation pour être prèt cet aprem' ( beaucoup de vent annoncé pour demain ) j'ai déclenché le failsafe alors que le zinc était sur la table. Résultat, le moteur a voulu démarrer et le contro a fumé à cause de l'hélice bloquée contre la table
Dernière édition par Fred Van.H. le Dim 27 Oct - 6:09, édité 1 fois
Fred Van.H.- Admin
- Messages : 3196
Date d'inscription : 30/07/2011
Age : 58
Localisation : Quelque part près de Bordeaux -
Re: Retour de force
Fred Van.H. Sam 26 Oct - 21:34
L'électronique a été sommairement fixée au pupitre, il faut bien l'admettre, mais pour le reste l'installation est opérationnelle et tout marchait
N'empèche, au moment de voler...
Le principal doute venait du mode de lancement :
Pendant le catapultage, le manche doit être dans une position précise, un peu cabré. Sinon, l'avion risque de plonger en sortie de la rampe, ou de décrocher si on tire trop fort.
Hors, à vitesse nulle, on sent mal le neutre du manche. Logique
Pendant un décollage sur piste, la vitesse augmente assez progressivement pour que le manche durcisse avant que l'avion ne quitte le sol. Mais là?
N'allais-je pas donner des ordres inconsidérés ou maintenir le manche dans une mauvaise position pendant le lancement?
En fait non, ça s'est bien passé.
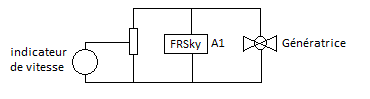
Le premier vol a montré que le manche durcissait fortement dés les basses vitesses, en même temps que la vitesse affichée par l'indicateur de vitesse, qui je le rappelle est actionné lui aussi par le courant de la génératrice, était proche de la course maximum de l'aiguille.
Je me suis donc posé pour diminuer le pas du moulinet. Car moins de pas, pour une même vitesse, = moins de tours/mn.
Cela a été efficace, car au deuxième vol...
Deuxième vol, les réactions du manche et de l'indicateur de vitesse étaient bien plus proportionnelles.
Je me suis dailleurs amusé à faire des piqués légers suivis de ressources, pour sentir dans le manche les différences de vitesse, ou simplement mettre les gaz à fond. C'est convainquant
C'est dailleurs surprenant, après avoir évolué tranquillement, de faire une ligne droite en accélérant, et de voir en voulant virer, que le manche résiste dur!
Cela manque encore de règlage, car la dureté du manche est toujours un peu trop forte relativement, dès que la génératrice tourne un peu dès le lancement, et à vitesse moyenne. Par contre, cette fois je ne diminuerais pas le pas du moulinet, mais je jouerais sur le bras de levier du servo, ce qui le sollicitera moins, éventuellement j'ajouterais une résistance variable à bord de l'avion entre la génératrice et l'indicateur de vitesse et le récepteur, qui permettra de régler finement avec facilité, et sur la courbe de réaction du servo, que LOMA a rendue programmable
Petit problème à résoudre :
Bien que l'indicateur de vitesse montre des variations de vitesse progressives, le servo quant à lui, a fréquement des mouvements un peu saccadés.
Peut être faudrait-il lisser les ordres qu'il reçoit, ou ce qui sort de la génératrice
Cela empèche d'oublier la mécanique, et enlève une partie du plaisir.
Bref, il y a de la mise au point, mais il fallait s'y attendre. Et Tout compte fait, ça marche déjà plutôt pas mal pour un début. On ne peut pas dire que je galère. Grâce à LOMA
Idée
Une cerise intéressante sur ce gâteau, serait de remettre en fonction le vibreur dont le joystick était équipé à l'origine.
En disposant judicieusement un ou deux switchs à palpeur sur le bras du servo, on pourrait le mettre en marche à l'approche de la vitesse de décrochage et de la VNE. Pas évident à régler en atelier, par contre... encore que, en simulant la vitesse grâce au dispositif qui fournit jusqu'à 3,3v qui a servi à LOMA pour l'essai de l'électronique, et en prenant les bons repères sur l'indicateur de vitesse, ça devrait aller
A suivre....
Je ferais une video, mais il faudra patienter un peu
Fred
Dernière édition par Fred Van.H. le Dim 27 Oct - 8:33, édité 6 fois (Raison : i)
Fred Van.H.- Admin
- Messages : 3196
Date d'inscription : 30/07/2011
Age : 58
Localisation : Quelque part près de Bordeaux -
Re: Retour de force
Fred Van.H. Dim 27 Oct - 9:29
Pourtant ça marchait
J'ai rétabli, on verra quelle différence ça fait.
Fred Van.H.- Admin
- Messages : 3196
Date d'inscription : 30/07/2011
Age : 58
Localisation : Quelque part près de Bordeaux -
Re: Retour de force
LOMA Dim 27 Oct - 9:35
Si c'est pour réduire le débatement de l'indicateur de vitesse : ouiFred Van.H. a écrit:j'ajouterais une résistance variable à bord de l'avion entre la génératrice et l'indicateur de vitesse et le récepteur, qui permettra de régler finement avec facilité, et sur la courbe de réaction du servo, que LOMA a rendue programmable
mais ne pas réduire la tension qui rentre dans le récepteur 'A1'.
si il y a trop de débattement au servo, faut modifier dans le programme...
si mes souvenirs sont bons, la courbe actuellement programmer à cette forme:
forme expo :
il est possible de rajouter un lissage, moyennage, sur QQs trame,mais a savoir qu'un lissage entraine un retard... c'est un compromis à faire, et trouver sur combien de trame on moyenne... C'est qqs chose que j'ai deja fait sur un altimètre, je regarde ça...Fred Van.H. a écrit:
Petit problème à résoudre :
Bien que l'indicateur de vitesse montre des variations de vitesse progressives, le servo quant à lui, a fréquement des mouvements un peu saccadés.
Peut être faudrait-il lisser les ordres qu'il reçoit, ou ce qui sort de la génératrice
MerciFred Van.H. a écrit:
Bref, il y a de la mise au point, mais il fallait s'y attendre. Et Tout compte fait, ça marche déjà plutôt pas mal pour un début. On ne peut pas dire que je galère. Grâce à LOMA
il y a deux voies de cabler sur la carte ARDUINO, pourquoi ne pas utiliser pour y brancher un vieux variateur, dont le moteur est celui du joystic. en plus c'est proportionnel....Fred Van.H. a écrit:
Idée
Une cerise intéressante sur ce gâteau, serait de remettre en fonction le vibreur dont le joystick était équipé à l'origine.
En disposant judicieusement un ou deux switchs à palpeur sur le bras du servo, on pourrait le mettre en marche à l'approche de la vitesse de décrochage et de la VNE. Pas évident à régler en atelier, par contre... encore que, en simulant la vitesse grâce au dispositif qui fournit jusqu'à 3,3v qui a servi à LOMA pour l'essai de l'électronique, et en prenant les bons repères sur l'indicateur de vitesse, ça devrait aller
a+
LOMA
LOMA- Messages : 779
Date d'inscription : 30/07/2011
Age : 51
Localisation : Toulouse -
Re: Retour de force
Fred Van.H. Dim 27 Oct - 9:59
Tu as raison. Dailleurs, mieux vaut dans un premier temps, limiter la course en rapprochant la tringle de l'axe de la tête du servo, il travailléra plus en couple et sera moins sollicité.LOMA a écrit: Si c'est pour réduire le débatement de l'indicateur de vitesse : oui
mais ne pas réduire la tension qui rentre dans le récepteur 'A1'.
si il y a trop de débattement au servo, faut modifier dans le programme...
Ca dépend de ce qu'on appelle un retard. Un avion ne prend pas de la vitesse instantanément.LOMA a écrit: il est possible de rajouter un lissage, moyennage, sur QQs trame,mais a savoir qu'un lissage entraine un retard... c'est un compromis à faire, et trouver sur combien de trame on moyenne... C'est qqs chose que j'ai deja fait sur un altimètre, je regarde ça...
Je pensais que l'inertie de l'avion d'une part, et celle du moulinet en rotation d'une autre, allait apporter l'inertie nécessaire. Mais peut être que le signal qui sort de la génératrice n'est pas super propre?
oui mais c'est uniquement dans deux circonstances précises que ça doit tourner : trop lentement, ou trop vite.LOMA a écrit: il y a deux voies de cabler sur la carte ARDUINO, pourquoi ne pas utiliser pour y brancher un vieux variateur, dont le moteur est celui du joystic. en plus c'est proportionnel....
Cela dit, je retiens l'idée... pourquoi pas s'en servir pour faire tourner le ventilateur dont on parlait autrefois?
non, sans rire, sur le vibreur ça peut donner un attrait supplémentaire aux vitesses élevées...
... oui-oui, j'y réfléchirais
Une remarque :
Quand j'allume la station, le servo prend une position qui n'est pas le neutre qu'il a quand ensuite j'allume l'avion.
Total, il part en butée contre le support jusqu'à ce que l'avion soit en fonction. Pour l'instant, la solution trouvée est de débrancher le servo jusqu'à mise en tension de l'avion. 'faudra pas oublier de brancher avant le vol
A réfléchir...
Fred
Fred Van.H.- Admin
- Messages : 3196
Date d'inscription : 30/07/2011
Age : 58
Localisation : Quelque part près de Bordeaux -
Re: Retour de force
LOMA Dim 27 Oct - 10:09
Oui. c'est mieuxFred Van.H. a écrit:Tu as raison. Dailleurs, mieux vaut dans un premier temps, limiter la course en rapprochant la tringle de l'axe de la tête du servo, il travailléra plus en couple et sera moins sollicité.LOMA a écrit: Si c'est pour réduire le débatement de l'indicateur de vitesse : oui
mais ne pas réduire la tension qui rentre dans le récepteur 'A1'.
si il y a trop de débattement au servo, faut modifier dans le programme...
pour moi c'est la difference de temps entre la veleur lue au récepteur et l'envoi de la commande au servo... ( mais < à 1s ).Fred Van.H. a écrit:
Ca dépend de ce qu'on appelle un retard. Un avion ne prend pas de la vitesse instantanément.
Je pensais que l'inertie de l'avion d'une part, et celle du moulinet en rotation d'une autre, allait apporter l'inertie nécessaire.
Surement, j'avais regardé à l'oscillo, effectivement, pas terrible.. (qqs post précédent) déjà rajouter des condos faible valeur entre cosse et carcasse. et valeur plus grosse entre les deux cosses du moteur.Fred Van.H. a écrit: Mais peut être que le signal qui sort de la génératrice n'est pas super propre?
Et en programmant une courbe de cette maniéré ?Fred Van.H. a écrit:oui mais c'est uniquement dans deux circonstances précises que ça doit tourner : trop lentement, ou trop vite.
ah oui, il manque une valeur d'initialisation, au démarrage de l’application, je le rajouterai...Fred Van.H. a écrit:
Une remarque :
Quand j'allume la station, le servo prend une position qui n'est pas le neutre qu'il a quand ensuite j'allume l'avion.
Total, il part en butée contre le support jusqu'à ce que l'avion soit en fonction. Pour l'instant, la solution trouvée est de débrancher le servo jusqu'à mise en tension de l'avion. 'faudra pas oublier de brancher avant le vol
A réfléchir...
A+
LOMA- Messages : 779
Date d'inscription : 30/07/2011
Age : 51
Localisation : Toulouse -
Re: Retour de force
Fred Van.H. Dim 27 Oct - 12:47
Tout à fait jouable. La modif serait au niveau de l'avion, ou de la station-sol?LOMA a écrit: ( mais < à 1s )
Je suis sûr que ce genre de solution simple serait suffisante pour atténuer le souci. C'est chiant, mais pas non plus rhédibitoire pour le fonctionnement . Je veux dire qu'il ne manque pas grand chose pour que ce soit bon.LOMA a écrit: déjà rajouter des condos faible valeur entre cosse et carcasse. et valeur plus grosse entre les deux cosses du moteur.
Sauf que les points 2 et 4 doivent être exactement aux bons endroits.LOMA a écrit: Et en programmant une courbe de cette maniéré ?
T'en fais pas avec ça, on verra plus tard.
Du sur mesure, et un SAV personalisé. Génial!LOMA a écrit: ah oui, il manque une valeur d'initialisation, au démarrage de l’application, je le rajouterai...
Fred
Fred Van.H.- Admin
- Messages : 3196
Date d'inscription : 30/07/2011
Age : 58
Localisation : Quelque part près de Bordeaux -
Re: Retour de force
LOMA Dim 27 Oct - 15:40
Logiciel, c est plus simple. (si si)Fred Van.H. a écrit:Tout à fait jouable. La modif serait au niveau de l'avion, ou de la station-sol?LOMA a écrit: ( mais < à 1s )
Si tu te souviens bien, les positions en x sont aussi modifiables. Sauf que ca joue sur les deux sorties de servo.... mais rien n empeche de le faire pour chaque voies.Fred Van.H. a écrit:Je suis sûr que ce genre de solution simple serait suffisante pour atténuer le souci. C'est chiant, mais pas non plus rhédibitoire pour le fonctionnement . Je veux dire qu'il ne manque pas grand chose pour que ce soit bon.LOMA a écrit:t;] déjà rajouter de
s condos faible valeur entre cosse et carcasse. et valeur plus grosse entre les deux cosses du moteur.
Sauf que les points 2 et 4 doivent être exactement aux bons endroits.
T'en fais pas avec ça, on verra plus tard !
Ce soft est deja personnalisé, autant qu' il le soit a fond..... Mais rassure toi, c est modif ne sont pas compliques, le plus gros est fait.....Fred Van.H. a écrit:Du sur mesure, et un SAV personalisé. Génial!LOMA a écrit: ah oui, il manque une valeur d'initialisation, au démarrage de l’application, je le rajouterai..
Fred
A+
LOMA- Messages : 779
Date d'inscription : 30/07/2011
Age : 51
Localisation : Toulouse -
Re: Retour de force
Fred Van.H. Dim 27 Oct - 17:20
Je préfère aussi : comme ça, une seule modif et c'est bon pour tous les avions équipésLOMA a écrit: Logiciel, c est plus simple. (si si)
Ah non, j'avais pas capté. Bon à savoir!LOMA a écrit: Si tu te souviens bien, les positions en x sont aussi modifiables.
Déçu : je n'ai pas les images de mes vols d'hier. Juste le son. J'ai du merder
Ca m'aurait donné les correspondances entre vitesse GPS et indication de vitesse/air.
Des condos sur la génératrice :
ça ne va pas être facile, sur ce petit moteur de servo.
Au fait, j'avais essayé de souder une patte de support directement sur la carcasse, je n'y suis pas arrivé. Tous les moteurs sont -ils faits dans des matières qui se soudent? j'aurais peut être du gratter avant
Le problème c'est que maintenant je l'ai collé à la cyano dans un support en alu, les fils de sortie noyés dans la colle chaude, et que ça va être copieux à démonter. Mais bon, si c'est ça qu'il faut faire...
Fred
Fred Van.H.- Admin
- Messages : 3196
Date d'inscription : 30/07/2011
Age : 58
Localisation : Quelque part près de Bordeaux -
Re: Retour de force
LOMA Mar 29 Oct - 23:11
Après presque 2 mois, je l'ai enfin reçu!LOMA a écrit:N'ayant pas reçu l'adaptateur.Fred Van.H. a écrit:Je suis impatient
J'ai donc décidé de le fabriquer moi-m^me.
a+
LOMA- Messages : 779
Date d'inscription : 30/07/2011
Age : 51
Localisation : Toulouse -
Re: Retour de force
Fred Van.H. Mer 30 Oct - 5:58
Bravo LOMA
J'ai récemment entendu dire que les constructeurs de radio-commandes ont un peu les mêmes idées que nous, et ont dans leurs cartons des projets de radios de forme classique avec retour de force : deux manches comme d'hab, mais à dureté variable.
Fred
Fred Van.H.- Admin
- Messages : 3196
Date d'inscription : 30/07/2011
Age : 58
Localisation : Quelque part près de Bordeaux -
Re: Retour de force
LOMA Mer 30 Oct - 9:15
Merci, Mais j'ai triché, car j'avais déja réfléchi avant sur le décodage des trames !Fred Van.H. a écrit:Mais moins de 2 mois entre ma question "tu crois que c'est possible de...", et le premier vol expérimental !
Bravo LOMA
Après techniquement , iil n'y a pas de difficulté. mais faut le savoir le faire quand m^me...
Avec le 2.4G télémétrie, tout (ou presque) est possible, le fait de pouvoir transmettre du numérique dans les 2 sens, la porte est ouverte toutes les idées.. faut trouver la bonne... place à imaginationFred Van.H. a écrit:J'ai récemment entendu dire que les constructeurs de radio-commandes ont un peu les mêmes idées que nous, et ont dans leurs cartons des projets de radios de forme classique avec retour de force : deux manches comme d'hab, mais à dureté variable.
Fred
a+
LOMA- Messages : 779
Date d'inscription : 30/07/2011
Age : 51
Localisation : Toulouse -
Re: Retour de force
Fred Van.H. Sam 2 Nov - 21:36
En revanche, j'ai trouvé dans mes glingues, des moteurs plus petits, utilisés sur des jouets volants.
Ils sont nettement plus faciles à faire tourner et on ne sent pas les aimants comme si on passait les compressions d'un moteur thermique. Je craignais qu'ils ne suffisent pas à donner la tension requise, mais en y réfléchissant, petit moteur ne veut pas forcément dire moins de volts, ça peut aussi bien être moins d'ampères. Hors, ce qui nous intéresse pour cet usage est la tension.
Donc voila à quoi ça ressemble : c'est petit, hein?
Ce qui est génial, c'est que le servo frétille bien moins quand c'est ce moteur qui sert de capteur..
Ce qui l'est moins, c'est que c'est tellement petit, que je suis incapable de faire un moulinet ( Un moulinet, de loin ça ressemble à une hélice, mais le pas est beaucoup plus fort. C'est un élément récepteur, et non pas moteur ) aussi petit. L'arbre doit faire 0,8mm de diamètre
Fred
Fred Van.H.- Admin
- Messages : 3196
Date d'inscription : 30/07/2011
Age : 58
Localisation : Quelque part près de Bordeaux -
Re: Retour de force
LOMA Sam 2 Nov - 23:37
Fred Van.H. a écrit:Peut être que je n'ai pas utilisé des condos de la bonne valeur, mais honnêtement ça n'a rien changé aux frétillements de servo.
même si le frétillement existe toujours, la tension au borne du moteur est surement plus propre que sans.
Pourquoi ce frétillement.. :
La tension d'entrée admissible sur le récepteur est de 0 à 3.3V.
le récepteur numérise cette tension sur 8bits ( soit 256 valeurs, (2 puissance
donc la précision est de ( 3.3V / 256) 0.013V ("précision" n'est pas le terme idéal)
pour une plage de 0 à 3.3V en entée, le servo évolue de 0 à 180°. (
en gros on à 1° pour 0.02V en entrée du récepteur.
comme la carte envoi régulièrement ( 20 commande par seconde au servo)
et que la tension d'entrée n'est pas tres stable , le servo recois donc des ordre de position d'angle différent à chaque fois...
m^me si c'est pas énorm,on à une sensation de frétillement...
pour résoudre ça, il faut lisser la tension d'entrée, et faire un petit moyennage ( sur x valeurs) dans le soft.
Il doit, me rester une hélice d'anticouple d'un picooz...Fred Van.H. a écrit: aussi petit. L'arbre doit faire 0,8mm de diamètre
A+
LOMA- Messages : 779
Date d'inscription : 30/07/2011
Age : 51
Localisation : Toulouse -
Re: Retour de force
Fred Van.H. Dim 3 Nov - 5:33
L'anticouple de picooz : j'en ai aussi, mais le pas est beaucoup trop faible : avec 100km/h de vitesse, le truc va hurler à la mort et produire de la haute tension
Non, il faut que je fasse une micro-hélice avec un très grand pas . Presque en drapeau. Je vais y réfléchir, j'y arriverais.
Fred
Fred Van.H.- Admin
- Messages : 3196
Date d'inscription : 30/07/2011
Age : 58
Localisation : Quelque part près de Bordeaux -
Re: Retour de force
Fred Van.H. Dim 3 Nov - 12:27
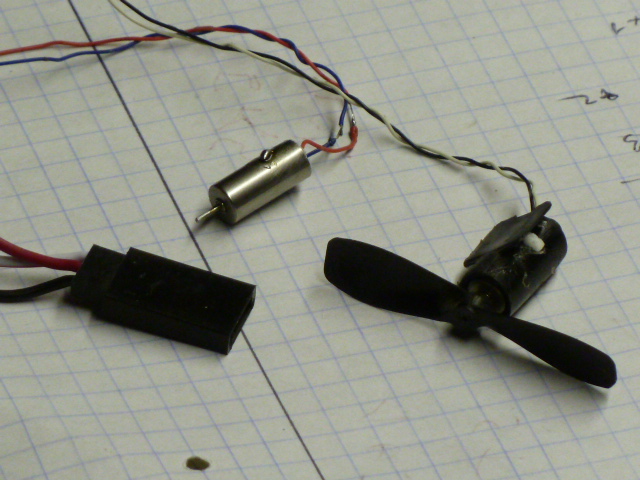
Les pales sont en tôle d'ofset ( alu 0,4mm d'épais )
Là j'ai pris un moteur de rotor principal de Picooz, avec le pignon. La lame d'alu a été entaillée au disque pour faire un emboitement pour le pignon, et ces deux pièces ont été assujetties par une ligature de mèche de kevlar collée à la cyano.
C'est pas gros, hein
Le moulinet fait 35mm de diamètre, le moteur 6mm

Là, c'est pour montrer la différence entre une hélice ( en noir ) et un moulinet ( alu ) :

Le pas est très différent.
Un moulinet, en gros, c'est une éolienne
Fred Van.H.- Admin
- Messages : 3196
Date d'inscription : 30/07/2011
Age : 58
Localisation : Quelque part près de Bordeaux -
Re: Retour de force
LOMA Dim 3 Nov - 20:18
moi installation de 30m² de laine de roche
et 30 plaques de placo à monter à l'étage.....
a+
LOMA- Messages : 779
Date d'inscription : 30/07/2011
Age : 51
Localisation : Toulouse -
Re: Retour de force
LOMA Dim 3 Nov - 22:49
Je viens de modifier le soft..(mais pas testé)
Les modifications, ameliorations sont les suivantes.
- initialisation de la position des servos au demarrage
- lissage des valeurs
- Ajout de la gestion d un 3eme servos
* Le servo 1 reagit a la tension A1 du recepteur, avec les point en x et y modifiables dans le but d y brancher l activation du vibreur.
* servo 2 reagit aussi sur A1 avec les points en y modifiable. Pour y brancher le retour de force.
* servo 3 reagit sur A2 avec les y modifiables.
Je n ai pas pu tester, car le fer a souder est en panne.. vivement noel...
LOM A+
LOMA- Messages : 779
Date d'inscription : 30/07/2011
Age : 51
Localisation : Toulouse -
Re: Retour de force
Fred Van.H. Lun 4 Nov - 6:08
La laine de roche, par contre, 'faut déjà savoir tondre les cailloux!
Pas volé ce we, temps pourri et divers autres raison. Pas grave, j'ai quand même avancé un peu à l'atelier
A+
Fred
Fred Van.H.- Admin
- Messages : 3196
Date d'inscription : 30/07/2011
Age : 58
Localisation : Quelque part près de Bordeaux -
Re: Retour de force
Fred Van.H. Ven 8 Nov - 9:36
Et ça peut s'envoyer par mail, ça?LOMA a écrit:Re
Je viens de modifier le soft..(mais pas testé)
Les modifications, ameliorations sont les suivantes.
- initialisation de la position des servos au demarrage
- lissage des valeurs
- Ajout de la gestion d un 3eme servos
* Le servo 1 reagit a la tension A1 du recepteur, avec les point en x et y modifiables dans le but d y brancher l activation du vibreur.
* servo 2 reagit aussi sur A1 avec les points en y modifiable. Pour y brancher le retour de force.
* servo 3 reagit sur A2 avec les y modifiables.
Je n ai pas pu tester, car le fer a souder est en panne.. vivement noel...
LOM A+
Fred Van.H.- Admin
- Messages : 3196
Date d'inscription : 30/07/2011
Age : 58
Localisation : Quelque part près de Bordeaux -
Re: Retour de force
LOMA Ven 8 Nov - 10:37
Le programme "oui"
mais je n'ai pas testé, c'est pour cela que je ne t'es rien envoyé.
a+
LOMA- Messages : 779
Date d'inscription : 30/07/2011
Age : 51
Localisation : Toulouse -
Re: Retour de force
Fred Van.H. Ven 8 Nov - 12:05
En attendant, j'espère pouvoir essayer le nouveau moulinet ce we.
En relisant certains témoignages de pilotes grandeur, j'ai vu qu'ils disent que la résistance du manche -ou en tout cas ce qui est ressenti par le pilote- dépend aussi du facteur de charge. Plus l'avion est soumis aux G, plus la pronfondeur en particulier, est lourde. Cela s'explique par le facteur de charge appliqué aux gouvernes, qui tend à les pousser vers le bas, et les bras du pilote qui deviennent lourds eux aussi.
Il y a donc un effort accru sur la gouverne, et sur le pilote.
Je ne sais pas si l'effet du premier est rendu sur le retour de force des avions modernes à commandes de vol électriques. Je ne pense pas que cela s'impose dans mon cas, mais comme j'ai de toute façon l'intention de m'attaquer à la sensation de "G", il est probable que j'en tienne compte à ce moment là
Fred
Fred Van.H.- Admin
- Messages : 3196
Date d'inscription : 30/07/2011
Age : 58
Localisation : Quelque part près de Bordeaux -
Page 4 sur 10 • 1, 2, 3, 4, 5, 6, 7, 8, 9, 10