Retour de force
Page 5 sur 10 •  1, 2, 3, 4, 5, 6, 7, 8, 9, 10
1, 2, 3, 4, 5, 6, 7, 8, 9, 10
Re: Retour de force
LOMA Ven 8 Nov - 13:51
Fred Van.H. a écrit:Pas grave, j'attendrais
Je t'enverrai la dernière version par mail... tu pourras l'essayer, si ça ne marche pas tu pourras revenir sur la version précédente
Je dirais aussi que la sensation des 'g' sur l'homme rend la manipulation des commandes plus difficile... (on dirait que c'est plus dur)Fred Van.H. a écrit:
En attendant, j'espère pouvoir essayer le nouveau moulinet ce we.
En relisant certains témoignages de pilotes grandeur, j'ai vu qu'ils disent que la résistance du manche -ou en tout cas ce qui est ressenti par le pilote- dépend aussi du facteur de charge. Plus l'avion est soumis aux G, plus la pronfondeur en particulier, est lourde. Cela s'explique par le facteur de charge appliqué aux gouvernes, qui tend à les pousser vers le bas, et les bras du pilote qui deviennent lourds eux aussi.
Il y a donc un effort accru sur la gouverne, et sur le pilote.
Je ne sais pas si l'effet du premier est rendu sur le retour de force des avions modernes à commandes de vol électriques. Je ne pense pas que cela s'impose dans mon cas, mais comme j'ai de toute façon l'intention de m'attaquer à la sensation de "G", il est probable que j'en tienne compte à ce moment là
Fred
Pour avoir fait un tour sur un vrai simulateur chez ATR , je peux te confirmer que les manches ne sont pas mous.. et même que pendant un exercice, ils y sont mis à deux pour tirer et réussir à décoller. ça criat "poll up" dans le cocpit..
J'ai un capteur Accéléromètre 2 axes... à sorties analogiques. (on en avait parlé il y qqs années)
on peux directement les brancher sur A1 et A2 du recepteur...,
a+

LOMA- Messages : 779
Date d'inscription : 30/07/2011
Age : 51
Localisation : Toulouse -

Re: Retour de force
Fred Van.H. Ven 8 Nov - 14:05
LOMA a écrit: J'ai un capteur Accéléromètre 2 axes... à sorties analogiques. (on en avait parlé il y qqs années)
on peux directement les brancher sur A1 et A2 du recepteur...,
C'est sensible?
Il y a "quelques années" ( une dizaine, ch'crois bien
Fred

Fred Van.H.- Admin
- Messages : 3196
Date d'inscription : 30/07/2011
Age : 58
Localisation : Quelque part près de Bordeaux -
Re: Retour de force
LOMA Ven 8 Nov - 14:39
De tête, c'est un ADXL33, +/- 2G, Et ne pèse que qqs gramme.Fred Van.H. a écrit:LOMA a écrit: J'ai un capteur Accéléromètre 2 axes... à sorties analogiques. (on en avait parlé il y qqs années)
on peux directement les brancher sur A1 et A2 du recepteur...,

C'est sensible?
Il y a "quelques années" ( une dizaine, ch'crois bien) , tu parlais d'accéléromètres sensibles à 50G!!!!!
Fred
Ah oui, les 50G , s'en ai d'autres que j'ai, ils vennaient de capteur de choc pour déclencher l'airbag.. Si tu veux faire une poste analyse apres un chrash d'avion, c'est effectivement ceux là qu'il te faut !!!!
LOMA- Messages : 779
Date d'inscription : 30/07/2011
Age : 51
Localisation : Toulouse -
Re: Retour de force
Fred Van.H. Dim 10 Nov - 6:26
Par contre, +2/-2, ce n'est pas la plage la plus adaptée. Je verrais mieux 5 ou 6G. Mais si tu as envie d'expérimenter et que tu cherches un banc d'essai volant, je suis volontaire
Voici le nouveau moulinet en place :

Il est plus petit que le précécent, et se met à tourner avec moins de vitesse.
Le cadran au tableau de bord :
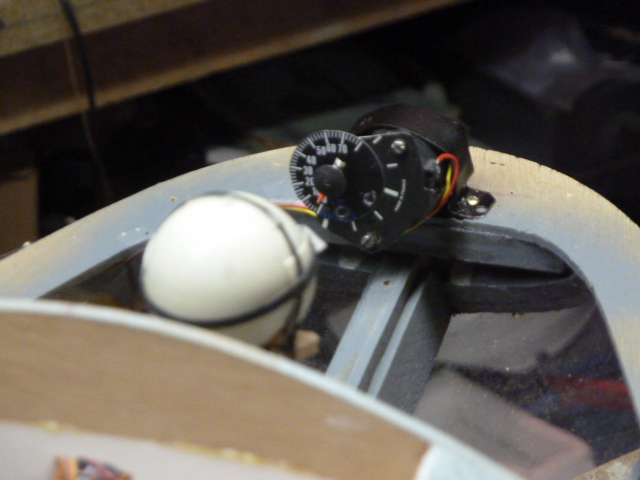
Je ne sais pas si ce sera linéaire, mais je vais essayer de faire coïncider les chiffres du cadran avec la vitesse réellle.
Ah, et puis je n'ai pas encore pris le temps de faire un boitier digne de ce nom pour l'électronique.
J'espère pouvoir tester en vol ce week end, mais la méteo...
Fred Van.H.- Admin
- Messages : 3196
Date d'inscription : 30/07/2011
Age : 58
Localisation : Quelque part près de Bordeaux -
Re: Retour de force
LOMA Dim 10 Nov - 10:09
c'esteffectivement une bonne indée, ca existe des tous fait sur Ebay, mais vraiment cher pour un boitier, ca depasse le prix de la carte..Fred Van.H. a écrit:
Ah, et puis je n'ai pas encore pris le temps de faire un boitier digne de ce nom pour l'électronique.
une petite boite à gâteau en métal est idéale...
je t'ai envoyé une version du Pgm retour de force. (version testée)
ici c'est le déluge... .Fred Van.H. a écrit:
J'espère pouvoir tester en vol ce week end, mais la méteo...
a+
LOMA- Messages : 779
Date d'inscription : 30/07/2011
Age : 51
Localisation : Toulouse -
Re: Retour de force
nabakou Dim 10 Nov - 10:37
chuis épaté par vos idées et par vos développements, et en même temps je me pose des questions, n'y voyez pas de critiques, c'est juste pour faire avancer le schmilblique :
question de base au plus expérimenté :
en fpv, est-ce vraiment utile de mesurer sa vitesse de vol de façon précise ? perso mon remzibi me l'indique mais franchement ça ne me sert pas beaucoup.
Peut-être en mode de vol "tactique" pour éviter les pertes de vitesses mais alors "un brin de ficelle" ou autre ne suffirait-il pas ?
2eme question : pour fabriquer le système ci-dessus, pourquoi convertir une tension sortant du capteur en digital, pour ensuite le convertir en pwm qui attaque un servo qui fait bouger une aiguillle...brancher à la sortie du moteur un galvanomètre avec des diodes et un pont diviseur ne suffirait-il pas ?
3eme : en dehors du plaisir de le concevoir et le fabriquer...un anémomètre coûte 12 dollars, quitte à le vampiriser et en extraire ses entrailles pour l'adapter à l'avion...

http://www.ebay.com/itm/Mini-Digital-LCD-Display-Wind-Speed-Gauge-Scale-Anemometer-Thermometer-ES9P-/370937549764?pt=US_Weather_Meters&hash=item565d99d3c4

nabakou- Messages : 206
Date d'inscription : 13/10/2013
Re: Retour de force
LOMA Dim 10 Nov - 11:32
Ton remzibi tedonne une vitesse sol ou air ?.nabakou a écrit:salut les gars,
chuis épaté par vos idées et par vos développements, et en même temps je me pose des questions, n'y voyez pas de critiques, c'est juste pour faire avancer le schmilblique :
question de base au plus expérimenté :
en fpv, est-ce vraiment utile de mesurer sa vitesse de vol de façon précise ? perso mon remzibi me l'indique mais franchement ça ne me sert pas beaucoup.
Peut-être en mode de vol "tactique" pour éviter les pertes de vitesses mais alors "un brin de ficelle" ou autre ne suffirait-il pas ?
dans ce cas c'est aussi interessant de connaitre la vraix vitesse, afin de varifier la conception de l'aeronef. si on fabrique un avion prévu pour un vol lent et qu'il decroche à 80km/h, c'est que l'on a fait une boulette qqs part !!
et puis le but est retransmettre cette vitesse pour la faire ressentir au pilote ..
C'est ce que fred fait, il est branché en direct, le pont de diode n'est pas nécessaire la dynamo fournit une tension continue ! mais dans ce cas l'indicateur de vitesse est dans l'avion. ici le but est aussi de durcir le manche de pilotage en fonction de la vitesse. et là l'info est transporter au sol, on utilise la télémétrie interne FRSKY. d où d’utilité de convertir...nabakou a écrit:
2eme question : pour fabriquer le système ci-dessus, pourquoi convertir une tension sortant du capteur en digital, pour ensuite le convertir en pwm qui attaque un servo qui fait bouger une aiguillle...brancher à la sortie du moteur un galvanomètre avec des diodes et un pont diviseur ne suffirait-il pas ?
C'est une bonne solution, sauf que Fred n'est pas électronicien, (chacun son savoir-faire) et que convertir un signal carré de ce capteur en pwm, ou trame hexa pour la télémétrie, tout le monde ne sais pas le faire...cette solution (bonne) implique une carte électronique à bord... et la solution actuelle non..nabakou a écrit:
3eme : en dehors du plaisir de le concevoir et le fabriquer...un anémomètre coûte 12 dollars, quitte à le vampiriser et en extraire ses entrailles pour l'adapter à l'avion...
http://www.ebay.com/itm/Mini-Digital-LCD-Display-Wind-Speed-Gauge-Scale-Anemometer-Thermometer-ES9P-/370937549764?pt=US_Weather_Meters&hash=item565d99d3c4
d'ailleurs actuellement j'ai un pitot dans ce but...
a+
a+
LOMA- Messages : 779
Date d'inscription : 30/07/2011
Age : 51
Localisation : Toulouse -
Re: Retour de force
nabakou Dim 10 Nov - 12:02
ok,
pigé, je pensais que c'était juste un affichage dans le cockpit...
nabakou- Messages : 206
Date d'inscription : 13/10/2013
Re: Retour de force
Fred Van.H. Dim 10 Nov - 12:03
MerciLOMA a écrit:je t'ai envoyé une version du Pgm retour de force. (version testée)
Allez, je m'y colle cet aprem'
Fred Van.H.- Admin
- Messages : 3196
Date d'inscription : 30/07/2011
Age : 58
Localisation : Quelque part près de Bordeaux -
LOMA- Messages : 779
Date d'inscription : 30/07/2011
Age : 51
Localisation : Toulouse -
Re: Retour de force
Fred Van.H. Dim 10 Nov - 12:12
La vitesse/sol est intéressante pour la navigation, mais l'avion vole par rapport à l'air.
Pour prendre un exemple concret, la X8 décroche vers 35 ou 40km/h selon sa charge alaire, et se met à flutter comme une dingue à partir de 110. Il m'est arrivé de voler avec un vent de 60km/h, et de ne plus savoir ou j'en étais par rapport à l'air. Il m'est arrivé d'avoir à poser rapidement, mais de ne pas oser pousser le manche de peur de voir tout se mettre à vibrer, et donc d'attendre patiemment que le zinc descende, tout en me faisant saucer. Et pour passer une boucle, etc...
Quant à la dureté du manche, c'est pratiquement passer de deux dimensions à trois. J'ai déjà décrit ce que je ressens avec ce système précédemment
Fred
Fred Van.H.- Admin
- Messages : 3196
Date d'inscription : 30/07/2011
Age : 58
Localisation : Quelque part près de Bordeaux -
Re: Retour de force
nabakou Dim 10 Nov - 12:56
ah oui,
expliqué comme cela c'est tout de suite plus clair
vous êtes des précurseurs dans la matière, il y a fort à parier que dans un futur +/- proche, la télémétrie servira beaucoup plus à renvoyer ce genre de sensations pour le pilote plutôt qu'un tas de chiffres
je m'demande si les drônes militaires sont équipés de ce genre de choses..
nabakou- Messages : 206
Date d'inscription : 13/10/2013
Re: Retour de force
Fred Van.H. Dim 10 Nov - 13:50
Il paraitrait que le retour de force sur les radios de haut de gamme est à l'étudenabakou a écrit:
il y a fort à parier que dans un futur +/- proche, la télémétrie servira beaucoup plus à renvoyer ce genre de sensations pour le pilote plutôt qu'un tas de chiffres
J'en doute pour deux raisons :nabakou a écrit: je m'demande si les drônes militaires sont équipés de ce genre de choses..
Primo les drones sont très automatisés et assistés.
Deuxio les militaires ne prévoient pas de les utiliser pour le plaisir.
A+
Fred
Fred Van.H.- Admin
- Messages : 3196
Date d'inscription : 30/07/2011
Age : 58
Localisation : Quelque part près de Bordeaux -
Re: Retour de force
Fred Van.H. Lun 11 Nov - 19:38
J'en ai profité pour régler et mettre au point.
Petite séance avec le souffleur à feuilles :

C'est folklo, hein?
Le sèche cheveux ça marche aussi, mais il me sort de l'air à 38km/h max
J'ai trouvé le réglage de la position initiale du servo pour qu'il se mette dans une position correcte au démarrage de l'électronique, mais en vitesse max le servo ne va pas assez loin. La génératrice ne doit pas produire assez de tension
Du coup je regrette d'avoir changé, j'aurais du attendre d'avoir ce nouveau programme avec le lissage.
Le lissage du signal, à propos, doit fonctionner impec car les mouvements du servo ne sont plus du tout saccadés tout en restant largement assez rapides.
Pas encore essayé la voie de commande du vibreur. Chaque chose en son temps
Bref, c'est pas fini, mais ça avance
Fred Van.H.- Admin
- Messages : 3196
Date d'inscription : 30/07/2011
Age : 58
Localisation : Quelque part près de Bordeaux -
Re: Retour de force
LOMA Lun 11 Nov - 20:27
Ca dépend si le servo est en position max..Fred Van.H. a écrit:Je n'ai pas volé non plus ce w.e.
Il y a un moyen d'amplifier l'angle du servo par rapport à la tension mesurée à bord?
s'il est déja en position max, non
s'il ne l'est pas oui, grace à la courbe de réponse.
quelle tension as tu dans la configuration de vent maxi ?
sinon méthode informatique, avec ton pc portable et l'arduino, il est possible de faire afficher la tension en tmps réél ( petite modif du pgm, et on laisse le cable usb branché, pour afficher les valeurs... )
a+
LOMA- Messages : 779
Date d'inscription : 30/07/2011
Age : 51
Localisation : Toulouse -
Re: Retour de force
Fred Van.H. Lun 11 Nov - 21:24
J'imagine que dans le programme on ne peut pas régler plus de 180° de réponse?
Fred Van.H.- Admin
- Messages : 3196
Date d'inscription : 30/07/2011
Age : 58
Localisation : Quelque part près de Bordeaux -
Re: Retour de force
LOMA Mar 12 Nov - 9:33
Oui et Non.Fred Van.H. a écrit:Il faut que je mesure la tension, mais avec l'autre génératrice, j'avais assez de jus
J'imagine que dans le programme on ne peut pas régler plus de 180° de réponse?
Le programme utilise une bibliotheque Servo library, ( un ensemble de fontion pour piloter un servo. le positionnement du servo peux se faire de 2 manieres :
- Soit avec la fonction write(), dans ce cas le paramètre d'entrée est en Deg et compris entre [ 0 et 180 ], c'est ce qui est fait actuellement dans le pgm
- Sot avec le fonction WriteMicroseconds(), dans ce cas le paramètre d'entrée n'est plus en ms mais en nombre de µs. entre [700 et 2300] sachant que -90° correspond à peu près à 1000µs et 2000µ à +90°
on pourrait donc supposé que dans ce cas ou pourrait dépasser les (-90° et les +90° )... donc oui. version 1_03 ?
Au lieu d'avoir une courbe de réponse en DEG on pourrait la faire en "µs", cela permettrait d'etre effectivement plus large plus large..
mais dans ce cas attention au valeurs extremes, qui pouurait positionnner le servo en butée mécanique.
a+
LOMA- Messages : 779
Date d'inscription : 30/07/2011
Age : 51
Localisation : Toulouse -
Re: Retour de force
Fred Van.H. Mar 12 Nov - 21:24
Ca fait re-modifier, mais tant pis.
Fred
Fred Van.H.- Admin
- Messages : 3196
Date d'inscription : 30/07/2011
Age : 58
Localisation : Quelque part près de Bordeaux -
Re: Retour de force
LOMA Mar 12 Nov - 21:47
plus la tension est élevée en sortie de la génératrice, mieux c'est ! ne dépassons pas les 50V !!Fred Van.H. a écrit:Ne te précipite pas, je vais commencer par remettre la génératrice du premier essai, ( moteur de servo, facilement disponible et facile à utiliser ) elle fournit assez de jus et ça permettra de voir si effectivement le lissage est efficace
Ca fait re-modifier, mais tant pis.
Fred
a+
LOMA- Messages : 779
Date d'inscription : 30/07/2011
Age : 51
Localisation : Toulouse -
Re: Retour de force
nabakou Mar 12 Nov - 22:21
le tube pitot que tu possèdes, c'est un modèle qui est adressable en I2C , du genre de celui-ci ?
http://www.buildyourowndrone.co.uk/Air-Speed-Sensor-Kit-MPXV7002DP-p/as-02dp.htm
nabakou- Messages : 206
Date d'inscription : 13/10/2013
Re: Retour de force
LOMA Mar 12 Nov - 22:45
Salutnabakou a écrit:hello Loma,
le tube pitot que tu possèdes, c'est un modèle qui est adressable en I2C , du genre de celui-ci ?
http://www.buildyourowndrone.co.uk/Air-Speed-Sensor-Kit-MPXV7002DP-p/as-02dp.htm
non c'est celui là..
http://www.hobbyking.com/hobbyking/store/uh_viewItem.asp?idproduct=7838
mais je n'ai pas encore essayé de dialoguer avec.
ce que je sais , c'est que le capteur de pression est branché sur un CAN Microchip avec une liaison I2C.
si on en parle il faudrait ouvir un nouveau Post ! afin de ne pas tous mélanger !! ( télémétrie, vitesse )
pk ?
a+
LOMA- Messages : 779
Date d'inscription : 30/07/2011
Age : 51
Localisation : Toulouse -
Re: Retour de force
Fred Van.H. Sam 16 Nov - 16:36
Est il possible que le lissage ait diminué le débattement du servo?
Je galère un peu pour régler, et j'ai l'impression de ne plus avoir autant de débattement qu'avec la première version du programme. C'est possible?
A+
Fred
Fred Van.H.- Admin
- Messages : 3196
Date d'inscription : 30/07/2011
Age : 58
Localisation : Quelque part près de Bordeaux -
Re: Retour de force
LOMA Sam 16 Nov - 16:46
Normalement, non, sauf bug..Fred Van.H. a écrit:@LOMA,
Est il possible que le lissage ait diminué le débattement du servo?
Je galère un peu pour régler, et j'ai l'impression de ne plus avoir autant de débattement qu'avec la première version du programme. C'est possible?
A+
Fred
je regarde ça...
le lissage n'entraine qu'un retard...
Si tu veux supprimer le lissage:
dans le code ( début du pgm)
actuellement il y ça :
#define COEF_VALUE_OLD (0.7)
#define COEF_VALUE_NEW (0.3)
A remplacer par ça :
#define COEF_VALUE_OLD (0)
#define COEF_VALUE_NEW (1)
ainsi la valeur envoyée au servo sera 100% la nouvelle valeur reçu du FRSKY.
LOMA- Messages : 779
Date d'inscription : 30/07/2011
Age : 51
Localisation : Toulouse -
Re: Retour de force
Fred Van.H. Sam 16 Nov - 21:17
Bon, et bien j'ai compris pourquoi j'ai galéré toute l'après midi. Et j'ai solutionné mon problème
Je me demandais, aussi, pourquoi j'avais du débattement quand j'ai volé la première fois, et plus maintenant
Quand j'ai mis en place le programme corrigé, j'ai constaté que le débattement était en en sens inverse, alors j'ai simplement inversé la prise à l'entrée du récepteur, et je n'y ai plus pensé.
Aujourd'hui, réglages.
Impossible d'avoir un débattement suffisant, et très difficile de paramétrer la position initiale du servo.
En fait, le servo débattait près d'une de ses butées, et en sa direction ce qui limitait sa course. C'est en me demandant comment contourner ce problème, que j'ai essayé de le faire débattre dans l'autre sens simplement en retournant la prise sur le Rx, et que j'ai retrouvé son comportement initial ...et que je me suis souvenu de cette inversion par rapport à la première version du programme.
Comment n'ai-je pas pensé avant à essayer ça? une seule explication : je suis un
Il a suffit ensuite de modifier la mécanique au niveau du joystick, ça a pris 5'.
Donc ça y est, ça remarche.
Constatation avec le grand débattement retrouvé : les tressautements du servo sont toujours là
J'ai essayé la génératrice faite avec un moteur de servo, et celle faite avec un moteur d'hélico Picooz. Ce dernier produit moins de tressautement.
A+
Fred
Fred Van.H.- Admin
- Messages : 3196
Date d'inscription : 30/07/2011
Age : 58
Localisation : Quelque part près de Bordeaux -
Page 5 sur 10 • 1, 2, 3, 4, 5, 6, 7, 8, 9, 10